
AutoMap - Development of a robust positioning system for autonomous vehicles based on captured environmental information and GNSS/IMU data
 © GIH
© GIH
| Led by: | Hamza Alkhatib, Sören Vogel |
| Team: | Mohamad Wahbah, Rozhin Moftizadeh |
| Year: | 2023 |
| Funding: | mFUND project | funded by the BMDV (Bundesministerium für Digitales und Verkehr) |
| Duration: | 2023-2025 |
automap-development-of-a-robust-positioning-system-for-autonomous-vehicles-based-on-captured-environmental-information-and-gnss-imu-data
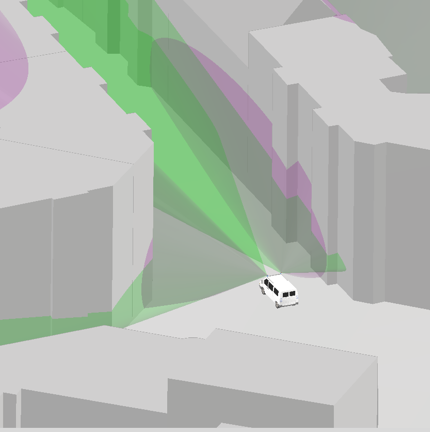
Determining the exact position of vehicles is not only crucial for autonomous driving, but also for many other applications. However, existing technologies such as global navigation satellite systems (GNSS) or inertial measurement units (IMU) reach their limits due to interference and inaccuracies, especially in urban areas.
Together with Quality Match GmbH as a project partner, a highly accurate (< 10 cm) positioning system is to be developed that will enable autonomous vehicles to precisely determine their position in their environment. State-of-the-art sensors collect environmental information, which is then compared with high-resolution 3D city models. The focus is on the development of real-time capable data analysis for automatic object recognition. The system is to be used across the board and in various traffic scenarios and environments.
The laser scan data of a vehicle is processed and methods are applied to improve data quality. A machine learning based algorithm is used to select a subset of the sensor data and then verify the quality through human judgement. Human interaction (human-in-the-loop) is expected to significantly improve the methodology. The processed data is then mapped to the 3D city model to achieve optimal results. Measurement deviations are reduced through the use of a special filter.
This mFUND project is funded by the BMDV (Bundesministerium für Digitales und Verkehr).





