
AutoMap - Entwicklung eines robusten Positionierungssystems für autonome Fahrzeuge auf der Grundlage erfasster Umgebungsinformationen und GNSS/IMU-Daten
 © GIH
© GIH
| Leitung: | Hamza Alkhatib, Sören Vogel |
| Team: | Mohamad Wahbah, Rozhin Moftizadeh |
| Jahr: | 2023 |
| Förderung: | mFUND-Projekt | BMDV (Bundesministerium für Digitales und Verkehr) |
| Laufzeit: | 2023-2025 |
Die genaue Bestimmung der Position von Fahrzeugen ist nicht nur für autonomes Fahren, sondern auch für viele andere Anwendungen von entscheidender Bedeutung. Die bisherigen Technologien, wie globale Navigationssatellitensysteme (GNSS) oder inertiale Messeinheit (IMU), stoßen jedoch aufgrund von Störungen und Ungenauigkeiten, insbesondere in innerstädtischen Gebieten, an ihre Grenzen.
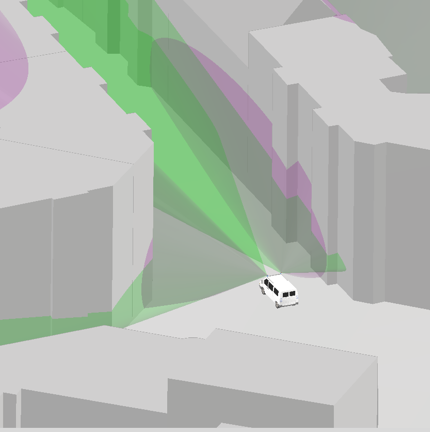
Zusammen mit der Quality Match GmbH als Projektpartner ist das Vorhabenziel die Entwicklung eines hochgenauen (< 10 cm) Positionierungssystems, das autonomen Fahrzeugen eine präzise Positionsbestimmung in ihrer Umgebung ermöglicht. Modernste Sensoren sammeln Umgebungsinformationen, die dann mit hochauflösenden 3D-Stadtmodellen abgeglichen werden. Der Schwerpunkt liegt auf der Entwicklung einer echtzeitfähigen Datenanalyse zur automatisierten Objekterkennung. Das System soll flächendeckend und in verschiedenen Verkehrsszenarien und Umgebungen einsetzbar sein.
Die Laserscan-Daten eines Fahrzeuges werden verarbeitet und Methoden zur Verbesserung der Datenqualität angewandt. Ein auf maschinellem Lernen basierender Algorithmus wird verwendet, um eine Teilmenge der Sensordaten auszuwählen, und hiernach die Qualität durch menschliche Auswertung zu überprüfen. Durch die menschliche Interaktion (Human-in-the-loop) wird eine wesentliche Verbesserung der Methodik erwartet. Die verarbeiteten Daten werden dann dem 3D-Stadtmodell zugeordnet, um optimale Ergebnisse zu erzielen. Durch den Einsatz eines speziellen Filters werden Messabweichungen reduziert.
Dieses mFUND-Projekt wird vom BMDV (Bundesministerium für Digitales und Verkehr) gefördert.
Informationen zum Datenschutz gemäß Art. 13 und 14 DSGVO für die Datenerhebung im öffentlichen Raum im Rahmen des mFund-Verbundprojekt des Bundesministeriums für Digitales und Verkehr „AutoMap“ - Förderkennzeichen: 19F2256A/B finden Sie unter dem folgenden Link: AutopMAP Datenschutz





