
Subsampling Approaches and their Impact on Georeferencing of Multi-Sensor-Systems (MSS)
| Led by: | Hamza Alkhatib, Rozhin Moftizadeh |
| E-Mail: | moftizadeh@gih.uni-hannover.de |
| Team: | Robin Rademacher |
| Year: | 2021 |
| Duration: | 01/2021 - 05/2021 |
| Is Finished: | yes |
Subsampling Approaches and their Impact on Georeferencing of Multi-Sensor-Systems (MSS)
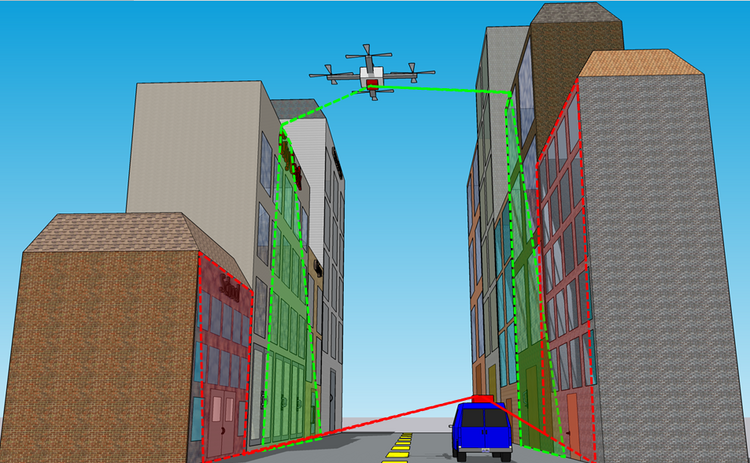
A Multi-Sensor-System (MSS) refers to various installed sensors on a single platform that are frequently used in engineering to capture different aspects of an environment. In order to combine the derived data for further analysis purposes, it is important for the MSS to be georeferenced. The easiest and most straightforward way of georeferencing is to rely on Global Navigation Satellite System (GNSS) and Inertial Measurement Unit (IMU) data. However, such direct data are not always available or reliable enough to be used for localization purposes. Therefore, suitable filtering techniques are required to increase the georeferencing accuracy. Within the filtering techniques measurements from different sensors should be considered in order to better estimate the unknown parameters. However, having multiple sensors means to have large amount of observations, which lead to inefficiencies of the filtering procedures from the computation time aspect. Therefore, it is of great importance to reduce the amount of data without losing important information they might contain. In this master thesis, different subsampling methodologies for reducing the amount of observations taken from various sensors are implemented and evaluated against each other. The main focus is georeferencing of an Unmanned Aerial Vehicle (UAV) in a simulated environment within the Kalman filter framework.





