
Improving the Prediction Accuracy of an Existing LSTM-RNN for Road Trajectories
 © GIH/Ernst
© GIH/Ernst
| Led by: | Hamza Alkhatib, Ralf Hofmann (IAV), Dominik Ernst |
| Team: | Zhinchen Xiao |
| Year: | 2023 |
| Date: | 05-10-23 |
| Duration: | 07/2023 - 01/2024 |
| Is Finished: | yes |
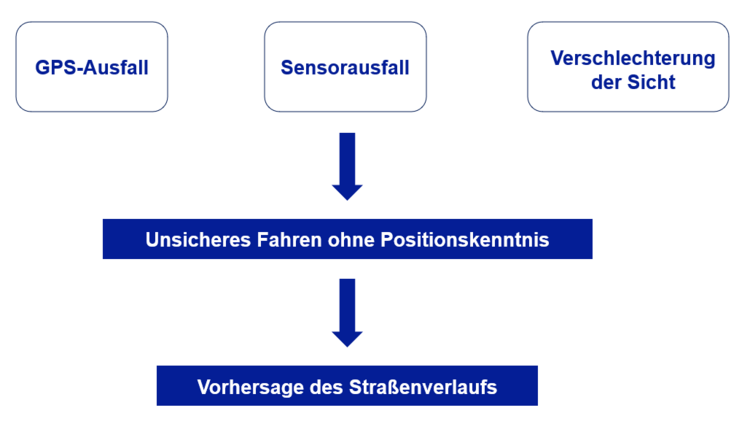
As the proliferation of intelligent autonomous vehicles continues, the importance of accurately and reliably understanding the vehicle's position during its operation becomes increasingly prominent, especially in the realm of localization and navigation. While existing prediction models such as Long Short-Term Memory Recurrent Neural Networks (LSTM-RNN) have shown promising results, inaccuracies in input data may lead to erroneous predictions. To address this issue, the Kalman filter is employed to progressively correct the precise location of the vehicle based on its kinematic data and GPS signals. Subsequently, the more accurate position estimates are incorporated as inputs into existing encoder-decoder models, and the network architecture is optimized to generate more precise forecasts of road trajectories. The outcomes of this work aim to enhance the accuracy of extended Kalman filter estimation in fusing kinematic and GPS signal information and evaluate the applicability of the encoder-decoder network in this task.





