
Extrinsic Calibration of an Inertial Measurement Unit on a Multi-Sensor System platform
| Led by: | Arman Khami, Sören Vogel, Mohammad Omidalizarandi |
| E-Mail: | khami@gih.uni-hannover.de |
| Team: | Liu Jiayu |
| Year: | 2021 |
| Duration: | 06/2021 - 12/2021 |
| Is Finished: | yes |
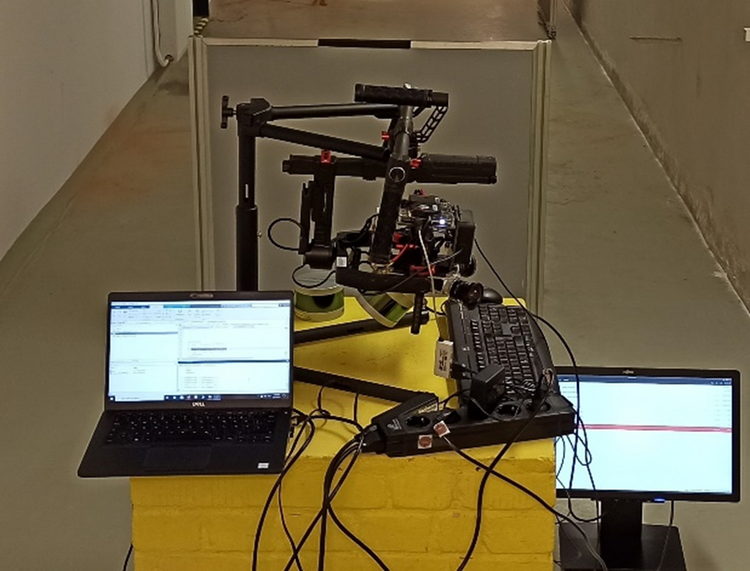
Internal and External calibration of Inertial Measurement Unit (IMU) in the Multi-Sensor Systems
Sensors data fusion is an optimal way to overcome individual sensor limitations. In many various fields like Geodetic, Industry or Autonomous applications, Multi Sensor data usage is a common and most of the time necessary solution. However, the essential step before the Multi Sensor data fusion is to estimate the interior calibration parameters of each individual sensor and its spatial transformation parameters in the platform coordinate system or with respect to other sensors (External calibration). In this thesis, you are supposed to have a study on Internal and External calibration of an Inertial Measurement Unit (IMU) in a proposed platform.
You can start with this thesis if you:
- Master Students of Geodesy and Geoinformatics (GuG), Navigation and Field Robotics (NuUR), Mechatronics and Robotics or similar.
- Interested to work with sensors
- Familiar with error propagation and adjustment theory
- You know the concepts of 3D transformation
- Have a good knowledge of programming (Matlab, C++, or Python)





