
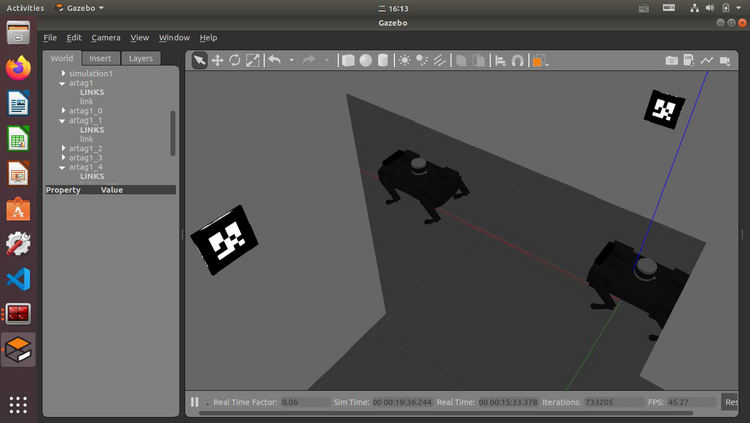
Cooperative georeferencing of robot-based multi-sensor systems in a simulation environment
| Led by: | Sören Vogel, Mohammad Omidalizarandi |
| Team: | Fan Wu |
| Year: | 2022 |
| Date: | 03-03-22 |
| Duration: | 02/2022 - 08/2022 |
| Is Finished: | yes |
Die Entwicklung von neuartigen Roboter-basierten Multi-Sensor-Systemen für die automatische Erfassung von beliebigen Umgebungen stellt hohe Anforderungen an den Entwicklungsprozess. Neben methodischen Gesichtspunkten umfasst dies zu einem großen Anteil auch grundsätzliche technische Aspekte wie z.B. die mechanische Realisierung, (An)Steuerung, Synchronisation und Kalibrierung. Ebenfalls müssen die finanzielle Machbarkeit und Verfügbarkeit unterschiedlicher Hardware berücksichtigt werden. Die aufgeführten Punkte sind zu einem Großteil getrennt von der eigentlichen methodischen Auswertung und Weiterverarbeitung der Sensorbeobachtungen anzusehen, nehmen bei einer praktischen Realisierung aber einen großen Stellenwert ein. Im Rahmen von dieser Masterarbeit soll untersucht werden, inwieweit sich der Entwicklungsprozess eines kinematischen Multi-Sensor-Systems nahezu ausschließlich auf die Methodik fokussieren kann, indem mechanisch-technische Herausforderungen durch die Verwendung der realitätsnahen Simulationsumgebung Gazebo minimiert werden. Hierfür soll ein Roboter-basiertes Multi-Sensor-System mit mehreren Sensoren simuliert und für die kooperative Georeferenzierung sowie 3D Umgebungserfassung angewendet werden.





