
Comparison of different measurement subsampling techniques in the localization of an autonomous multi-sensor-system
 © Ernst
© Ernst
| Betreuung: | Rozhin Moftizadeh, Hamza Alkhatib |
| Bearbeitung: | Hao Heshan |
| Jahr: | 2022 |
| Laufzeit: | 05/2022 - 11/2022 |
| Ist abgeschlossen: | ja |
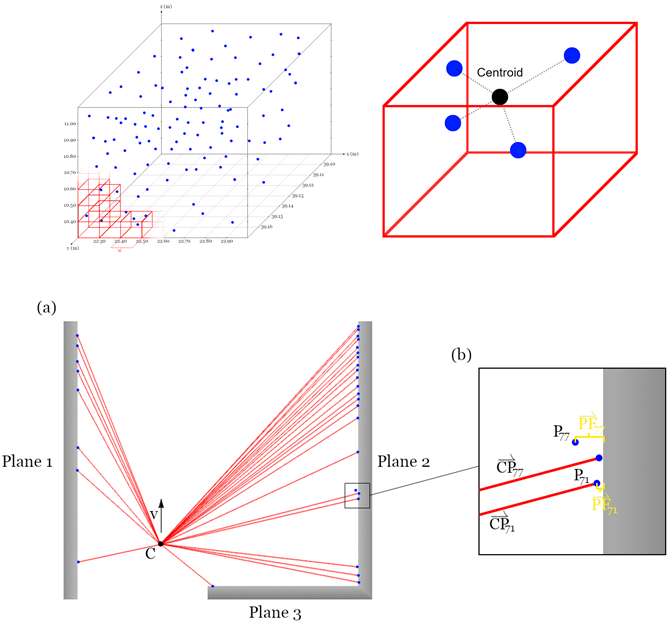
A multi-sensor-system refers to various installed sensors on a single platform that are frequently used in engineering to capture different aspects of an environment. In order to combine the derived data for further analysis purposes, it is important for the MSS to be georeferenced. The easiest and most straightforward way of georeferencing is to rely on GNSS and IMU data. However, such direct data are not always available or reliable enough to be used for localization purposes. Therefore, suitable filtering techniques are required to increase the georeferencing accuracy. On the other hand, the environment in which the MSS moves through, might contain valuable information that can be fused with the other existing data to increase the reliability of the results even more. Such information could be e.g. geometrical information of the buildings in an environment for which their geometry can be extracted from the available 3D digital city models. To do so, one way would be to scan the environment with scanners and then link the derived 3D point clouds to the building models. However, the scanned data are usually large in size and therefore using them directly in the filtering approaches leads to computational inefficiencies. The focus of the current work is to compare different subsampling approaches in a Kalman filtering framework to localize a multi-sensor-system moving in an inner-city area. The methodologies are tested not only on a simulated environment, but also on a real case study as well.





