
Constrained Particle Filter with Implicit Measurement Equations for Georeferencing of Multi-Sensor-Systems (MSSs)
| Betreuung: | Hamza Alkhatib, Rozhin Moftizadeh |
| E-Mail: | moftizadeh@gih.uni-hannover.de |
| Bearbeitung: | Jan Jüngerink |
| Jahr: | 2021 |
| Laufzeit: | 03/2021 - 08/2021 |
| Ist abgeschlossen: | ja |
Constrained Particle Filter with Implicit Measurement Equations for Georeferencing of Multi-Sensor-Systems (MSSs)
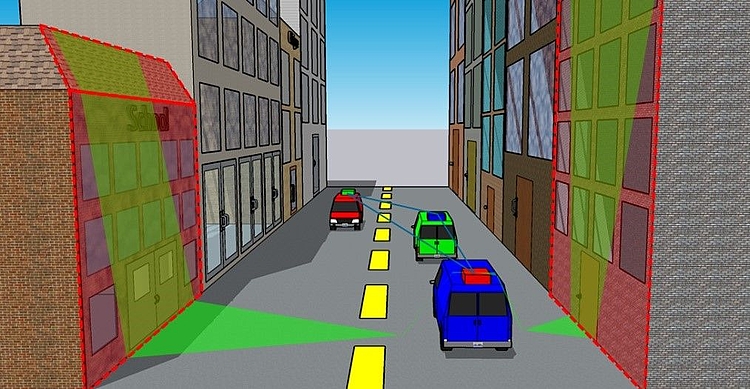
A Multi-Sensor-System (MSS) refers to various installed sensors on a single platform that are frequently used in engineering to capture different aspects of an environment. In order to combine the derived data for further analysis purposes, it is important for the MSS to be georeferenced. The easiest and most straightforward way of georeferencing is to rely on Global Navigation Satellite System (GNSS) and Inertial Measurement Unit (IMU) data. However, such direct data are not always available or reliable enough to be used for localization purposes. Therefore, suitable filtering techniques are required to increase the georeferencing accuracy. Moreover, the environment in which the MSS moves through might contain valuable information that can be fused with the other existing data to increase the reliability of the results even more. Such information could be the existing geometrical features of the environment that could be imposed on the estimated parameters. In this master thesis, the particle filtering framework is used instead of Kalman filter to reach an accurate localization by considering the geometrical constraints. In Kalman filter optimal solutions could only be reached if the filter is properly initialized; otherwise, the filter diverges and no reliable estimations could be derived. On the other hand, the main assumption in Kalman filter is having Gaussian distributions for the process as well as for the measurement noise. However, in real applications, no proper initialization and Gaussian distribution assumptions could be made. Therefore, the particle filter framework is chosen in order to eliminate such requirements and assumptions and hence to develop a more realistic methodology to be applied on real scenarios.





