
Implementation of Inversely Weighted Distance Subsampling Approach for Georeferencing of Multi-Sensor-Systems by Extended Kalman Particle Filter
| Led by: | Rozhin Moftizadeh, Hamza Alkhatib |
| Team: | Zhang Meng |
| Year: | 2022 |
| Duration: | 10/2023 - 04/2023 |
| Is Finished: | yes |
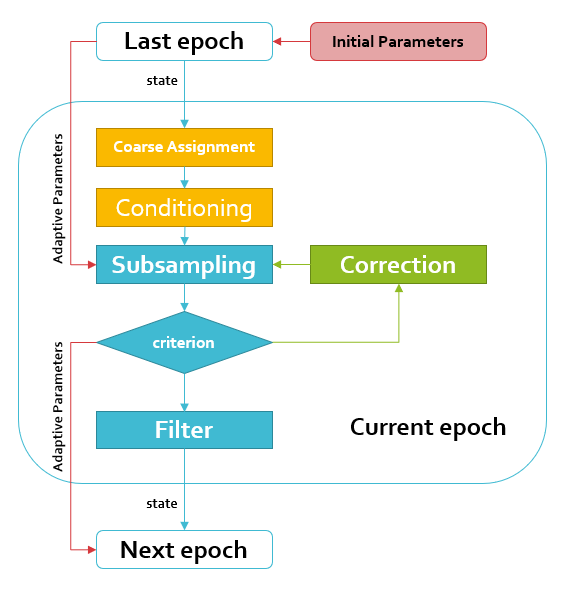
Multi-Sensor-System georeferencing is a challenging task when it comes to inner-city areas in which high-rise infrastructures avoid having reliable GNSS signals. On the other hand, the IMU data are usually subject to drifting over time. Therefore, suitable techniques should be used to compensate for the measurement errors of such sensors and hence to improve the reliability of the georeferencing solutions. One of such strategies is to engage more senors on board, which in turn help to have more information about the surrounding and therefore a more reliable localization. Of such sensors 3D scanners could be mentioned, which can help capturing the environment by means of 3D point clouds. Using the 3D point clouds directly leads to high computation times and hence an inefficient localization process. In order to speed up the process while maintaining high accuracy, the approach of Inversely Weighted Distance Subsampling (IWDS) is applied to the Extended Kalman Particle Filter (EKPF) for MSSs. Optimizations to the algorithm are made here to improve the robustness and efficiency. Three reference methods namely Grid Average (GA), OptD-Single-MLS (OptD), Distance Based Voxel Grid (DBVG), and a reference filter namely Iterated Extended Kalman Filter (IEKF) are used in this work for comparing the results.





