
Implementation of Constraints in Extended Kalman Particle Filter for Georeferencing of Multi-Sensor-Systems
| Led by: | Rozhin Moftizadeh, Hamza Alkhatib |
| Team: | Zao Yin |
| Year: | 2022 |
| Duration: | 10/2023 - 04/2023 |
| Is Finished: | yes |
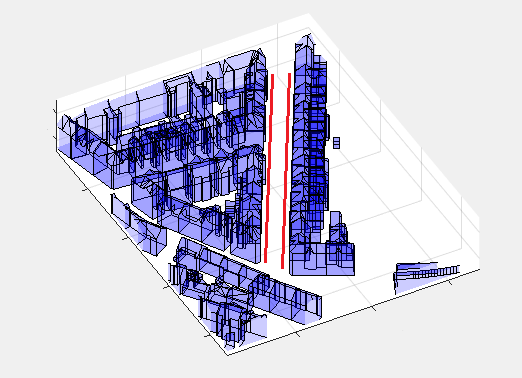
Reliable georeferencing of a Multi-Sensor-System (MSS) is a challenging task, which comprises at least the accurate determination of three translation and three orientation parameters. With the help of GNSS and IMU measurements, this information can be gained directly in the object coordinate system. However, sometimes the information coming from the sensor might not be reliable enough or it might even be unavailable, especially in urban areas. Because of the high building, GNSS information is affected by signal occlusions. In order to increase the accuracy of georeferencing, appropriate filtering techniques should be applied. A common choice is the Kalman filter, which works well for a linear and Gaussian distributed state. When it comes to nonlinear or non-Gaussian state, Extended Kalman Particle Filter (EKPF) has a much better performance. To further improve the result, some geometrical constraints can be included in the filter to restrict the potential pose of the MSS. These constraints can be gained via analyzing the surrounding of the MSS or the behavior of it. The way these geometrical constraints are applied and how they are combined with the filter are also critical to reduce the georeferencing error. In the current work, different constraint methods as well as different geometrical constraints are being compared in the frame of EKPF. The results are being tested on a simulated environment, which represents an urban area.





