
Automatisierung der Systemkalibrierung für LiDAR-basierte Multisensorplattformen
 © Ernst
© Ernst
| Led by: | Sören Vogel, Dominik Ernst |
| Team: | Stefan Kampmann |
| Year: | 2022 |
| Date: | 01-11-22 |
| Duration: | 10/2022 - 04/2023 |
| Is Finished: | yes |
LiDAR-Sensoren (light detection and ranging) finden in vielen Bereichen Anwendung. Durch die leichte Bauform sind LiDARs besonders für autonome Systeme geeignet. So werden die Sensoren für autonome Fahrzeuge zur Hinderniserkennung oder auch für UAVs (unmanned aerial vehicles) zur Aufzeichnung von Punktwolken als Unterstützung von Bilddaten eingesetzt.
Auch im geodätischen Kontext finden LiDARs als kinematische Messsysteme immer größere Anwendung. Häufig werden dabei low-cost Laserscanner (LiDAR) eingesetzt. Um die bestmöglichen Ergebnisse mit diesen Sensoren zu erreichen, sind Kalibrierungen notwendig. Diese Kalibrierungen können in einer separaten Kalibrierumgebung erfolgen oder in-situ vor der Messung erfolgen.
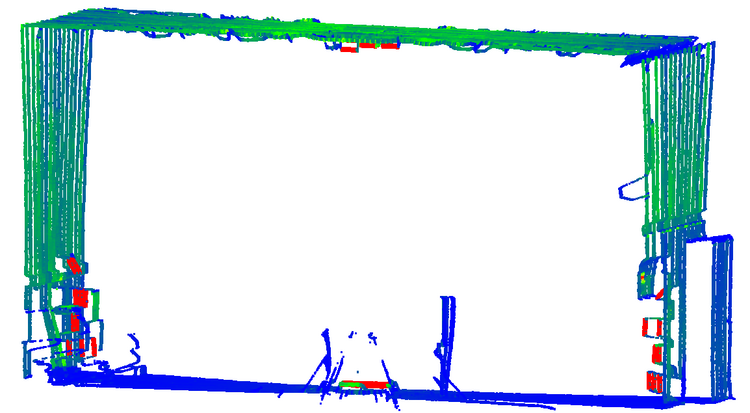
Nachteil bei diesen Kalibrierungen ist der Zeitaufwand bei der Erfassung und der Prozessierung. Der Aspekt des Zeitaufwandes wird in dieser Studienarbeit thematisiert. Dazu soll der Ablauf der Prozessierung einer extrinsischen Kalibrierung eines Fächerlaserscanners (Velodyne VLP-16) in Bezug auf ein Plattformkoordinatensystem automatisiert werden. Dazu sind besonders die Segmentierung der Punktwolke und das Ausschließen von Ausreißern von Bedeutung.





