
Synchronisationsaspekte der Sensor- und Datenfusion eines Forschungs-Multi-Sensor-Systems
| Led by: | Jens-André Paffenholz, Ingo Neumann |
| Team: | Dmitri Diener |
| Year: | 2016 |
| Duration: | 04/2016 - 10/2016 |
| Is Finished: | yes |
Die Erfassung der Umwelt durch Multi-Sensor-Systeme ist heutzutage ein gängiges Verfahren zur Aufnahme der Umgebung durch einen kinematischen Messansatz. Bei kinematischen Laserscansystemen werden mobile Plattformen eingesetzt, auf denen sich Vielzahl von Sensoren befinden. Als mögliche Aufnahmesensoren kommen Kamera und Laserscanner zum Einsatz. Der Laserscanner wird im Profilmodus betrieben und erfasst die Umgebung spiralförmig während der Fahrt. Kameras bilden u. a. die Grundlage zur Dokumentation. Mit Grundlagen der Bildverarbeitung können diese ebenfalls die geometrische Beschreibung der Umgebung rekonstruieren und in geeigneter Weise mit Daten des Laserscanners fusioniert werden.
Für die Steuerung des Multi-Sensor-Systems kommt in dieser Masterarbeit das Robot Operating System (ROS) zum Einsatz. Dieses Framework eignet sich sehr gut zur Steuerung eigens erstellter Roboter und kinematischer Sensorplattformen. Dabei werden alle Datenflüsse aufgezeichnet und nahezu Echtzeit ausgewertet.
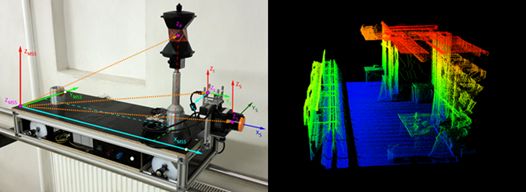
Ein aus früheren Untersuchungen entstandenes Multi-Sensor-System ist im Rahmen dieser Masterarbeit weiterentwickelt worden (Abbildung links). Zusätzliche Sensorik wie die Inertiale Messeinheit (IMU) und das Ublox GNSS Modul sind dazu gekommen. Dadurch kann einerseits die zeitliche Synchronisation verbessert, als auch die Grundlage zur Implementierung eines Navigationsalgorithmus auf Basis eines Kalman Filters realisiert werden.
Als Ergebnis dieser Arbeit ist eine geometrische Rekonstruktion der Einsatzumgebung in Form einer 3D-Punktwolke erzeugt worden. Diese ist in der Abbildung rechts zu sehen. Dabei ist festzuhalten, dass die räumliche Geometrie erfolgreich rekonstruiert werden konnte. In der Abbildung rechts sind die Schienenprofile (hellgrün links), Wand-, Boden- (blau) und Deckenflächen (rot) lage- und maßstabstreu zu erkennen.





