
Direkte Geo-Referenzierung von 3D-Punktwolken im Kontext von Monitoringaufgaben
| Betreuung: | Jens-André Paffenholz, Hamza Alkhatib |
| Bearbeitung: | Tim Plumhoff |
| Jahr: | 2017 |
| Laufzeit: | 04/2017 - 10/2017 |
| Ist abgeschlossen: | ja |
Das terrestrische Laserscanning (TLS) und die so gewonnen 3D-Punktwolken nehmen einen immer größeren Stellenwert beim ingenieurgeodätischen Monitoring von natürlichen und anthropogenen Strukturen und Objekten ein. Insbesondere bei komplexen Objektoberflächen weist das TLS aufgrund der flächenhaften Erfassung gegenüber den konventionellen, punktuellen Vorgehensweisen entscheidende Vorteile auf. Ein wesentlicher Schritt in der Prozessierung der erfassten 3D-Punkwolken ist deren Geo-Referenzierung, die die Überführung vom lokalen Koordinatensystem des Laserscanners in ein globales, übergeordnetes Koordinatensystem mit bekanntem geodätischem Datum beschreibt.
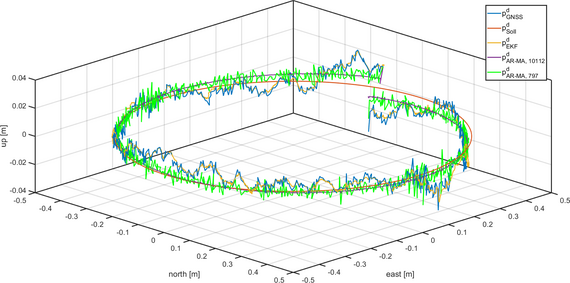
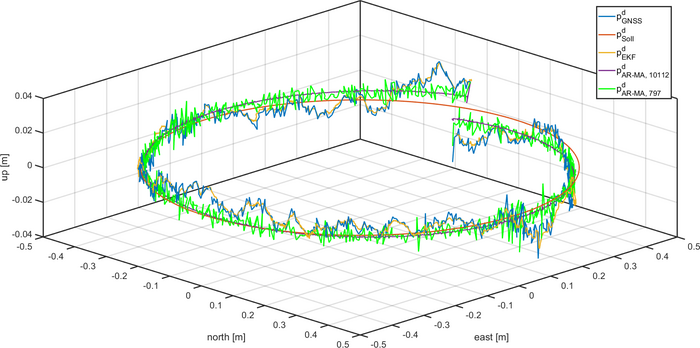
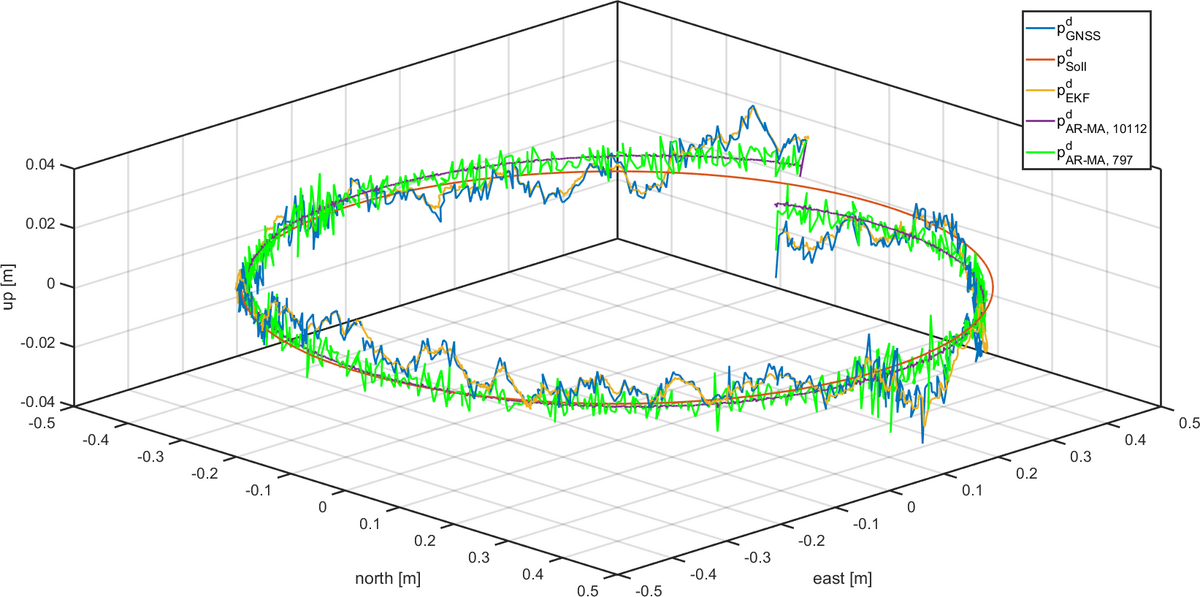
Im Rahmen der direkten Geo-Referenzierung erfolgt eine unmittelbare Beobachtung der notwendigen Transformationsparameter durch zusätzliche Sensorik, wie z. B. GNSS Ausrüstung. Hierzu bietet sich die Adaption von 3D-Positionssensoren an (hier GNSS-Ausrüstung auf dem um die Stehachse rotierenden Laserscanner). Aus der Trajektorie des GNSS Antennenreferenzpunktes im Raum lassen sich unter Kenntnis der zeitlichen Zuordnung der 3D-Positionen zu den 2D-Profilen der 3D-Punktwolke die gesuchten Transformationsparameter ableiten. In der Arbeitsgruppe TLS-basierte Multi-Sensor-Systeme (MSS) | Ingenieurgeodäsie am Geodätischen Institut der Leibniz Universität Hannover (GIH der LUH) wird an einem MSS, bestehend aus einem Laserscanner und GNSS-Ausrüstung, zur effizienten direkten Geo-Referenzierung geforscht. Die Auswertung der 3D-Positionen mit dem Ziel der Bestimmung der Transformationsparameter basiert auf einem rekursiven Filteransatz in Form eines erweiterten Kalman Filters.
Die Masterarbeit hat zur Evaluierung der Qualität der direkt georeferenzierten 3D-Punktwolken einen Punktwolkenvergleich zu einer Referenzpunktwolke hoher Präzision genutzt. Die praktische Umsetzung und die Auswertung erfolgt für eine 3D-Punktwolke von einem Standpunkt. Die 3D-GNSS-Trajektorie wurde durch einen Extended Kalman Filter und eine AR-MA-Filterung gefiltert, um das Messrauschen zu verringern. Diese gefilterte Trajektorie wurde anschließend im Doppel-Antennen-Szenario nach Paffenholz [2012] genutzt, um die Transformationsparameter für die direkte Georeferenzierung der Punktwolke zu bestimmen.





