
-
OpenData4InfMon: Monitoring mit GNSS-Sensorik und Open DataDie alternde Infrastruktur auf dem Landweg, der Schiene und dem Wasser erfordert bedeutende Ressourcen für die Sicherstellung der Betriebssicherheit. Das Monitoring von Deformationen, insbesondere an Brückenbauwerken und anderen wichtigen Infrastrukturen, verursacht durch Alterung, Materialermüdung und langsam (auch klimabedingt) verlaufende Bodenbewegungen, ist derzeit sehr kostenintensiv. Es gilt daher, massenhaft einsetzbare und kosteneffiziente Analyseverfahren anhand von Open Data Quellen kombiniert mit lokaler GNSS-Sensorik zu entwickeln und zu evaluieren, die es bisher nicht gibt. Im Projekt sollen Möglichkeiten der strengen Fusion von freien GNSS- und Radardaten sowie 3D-Stadtmodellen und Verkehrswegeplänen zum Zweck der besseren Beurteilung von Deformationen an Bauwerken in Kombination mit lokal installierter Sensorik untersucht werden, insb. an Infrastrukturen wie Bahntrassen, Energie-Leitungstrassen und (Brücken-) Bauwerken. Der Mehrwert der Daten wird insbesondere durch KI-Analysen und raumzeitliche Parameterschätzung in Kombination mit lokalen GNSS-Daten generiert.Leitung: Ingo Neumann, Mohammad OmidalizarandiTeam:Jahr: 2023Förderung: Bundesministerium für Digitales und Verkehr (BMDV)Laufzeit: 03/23 – 08/24
![]()
![]()
-
Deformationsanalyse auf der Grundlage von terrestrischen Laserscanner-Messungen (TLS-Defo): Unsicherheit der OberflächenannäherungBei geodätischen Verformungsanalysen werden geometrische Veränderungen in zwei oder mehr Zuständen statistisch untersucht. Um das volle Potenzial etablierter oberflächenbasierter Messverfahren wie dem terrestrischen Laserscanning (TLS) zu nutzen, ist eine kontinuierliche lokale und globale Modellierung der überwachten Oberfläche erforderlich. Das Projekt "Unsicherheit der Oberflächenannäherung" konzentriert sich auf die Untersuchung der Interaktion zwischen Mess- und Modellunsicherheiten im Zusammenhang mit der Auswahl von Oberflächenmodellen. Diese Komponenten sind eng miteinander verbunden, da die Höhe der Modellunsicherheit direkt von der Wechselwirkung zwischen der Komplexität des gemessenen Objekts, wie Rauheit und scharfe Kanten, und der räumlichen Dichte der Messpunkte über das Objekt beeinflusst wird. Um dies zu berücksichtigen, unterscheidet das Projekt zwischen drei Unterthemen: TLS-Unsicherheitsbudget, Modellunsicherheit und die Anwendung der fraktalen Geometrie als methodisches Werkzeug zur Erreichung des primären Projektziels.Leitung: Ingo Neumann, Mohammad OmidalizarandiTeam:Jahr: 2023Förderung: DFGLaufzeit: 10/23 – 09/27
![]()
![]()
-
port_AI – Ein volldigitaler Zwilling für Hafenbauwerke unter Nutzung von IoT, 5G, BIM, AR- und KI-Verfahren zum Aufbau eines smarten Building-Lifecycle-ManagementsDie Anforderungen an die Sicherheit und Zuverlässigkeit des Anlagenmanagements der Infrastrukturbauwerke im Bereich der See- und Binnenhäfen nehmen aufgrund des zunehmend globalisierten Handels stetig zu. Durch die Schaffung einer Smart-Infrastructure sollen in diesem Projekt verschiedene Herausforderungen im Umfeld des Managements bestehender Hafeninfrastruktur gelöst werden. Auch die Digitalisierung sowie der Einsatz von KI Verfahren sind im Rahmen dieses Projektes unter dem Begriff der Smart-Infrastructure subsummiert. Nur ein durchgreifend digitales Management von Hafeninfrastruktur ermöglicht den sparsamen Einsatz von Ressourcen, eine vorausschauende Instandsetzung, frühzeitige sowie umfassende Schadenserkennungen und –bewertungen. Dies kann zu einer erheblichen Kosteneinsparungen führen.Leitung: Ingo Neumann, Hamza Alkhatib, Mohammad OmidalizarandiTeam:Jahr: 2021Förderung: Förderprogramm für Innovative Hafentechnologien (IHATEC) unterstützt durch das Bundesministerium für Verkehr und digitale Infrastruktur (BMVI)Laufzeit: 12/2021 – 11/2024
![]()
![]()
-
Integrity contained navigation based on vehicle data and constrained collaborative informationMulti-Sensor System (MSS) georeferencing is a challenging task in engineering which should be dealt with in the most accurate way possible. An example of a MSS is an autonomous car which drives through an environment and should be able to locate itself safely. The easiest and most straightforward way of georeferencing is to rely on the Global Navigation Satellite System (GNSS) and Inertial Measurement Unit (IMU) data. However, at indoor environments or crowded inner-city areas, such data lack enough accuracy to be entirely relied on. Therefore, appropriate filtering algorithms are required to compensate for such errors and to improve the results sufficiently. Sometimes it is also possible to increase the functionality of a filtering technique by engaging additional complementary information which can directly influence the outputs. Such information could be e.g. geometrical features of the environment in which the MSS runs through.Leitung: Ingo NeumannTeam:Jahr: 2020Förderung: DFG-Graduiertenkolleg i.c.sensLaufzeit: seit 2020
![]()
![]()
-
Qualitätsgerechte Virtualisierung von zeitvariablen ObjekträumenZiel des Projektes QViZO ist es ortsbezogene Erfassungs-, Verwaltungs- und Geschäftsprozesse von der Örtlichkeit in den virtuellen Raum zu verlagern. Bauwerke, Objekte und Strukturen werden mit Multi-Sensor-Systemen erfasst, als kolorierte 3D-Punktwolken repräsentiert und für die Anwender als authentischer digitaler Zwilling für die Betrachtung, Begutachtung und Analyse bereitgestellt. Um ein rechtlich belastbares und technisch reproduzierbares Maß an Objektauthentizität zu gewährleisten, ist es notwendig zu beschreiben, wann eine virtuelle Abbildung ihrem realen Pendent rechtlich gleich gestellt sein kann. In diesem FuE-Vorhaben soll daher ein neuartiges Verfahren und eine Schlüsseltechnologie zur qualitätsgerechten Virtualisierung von zeitvariablen Objekträumen entwickelt werden. Die Zielgruppen sind insbesondere die Bau- und Vermessungsbranche, Bauherren und Gutachter. Durch die zu entwickelnde Lösung sollen Vor-Ort-Termine signifikant reduziert werden, indem alle Beteiligten virtuell und ortsunabhängig auf den “digitalen Zwilling” des Objektes zugreifen können, so dass eine rechtskräftige Beurteilung und Beteiligung in Geschäfts- und Verwaltungsprozessen möglich wird.Leitung: Ingo NeumannTeam:Jahr: 2020Laufzeit: 2020 -2022
![]()
![]()
-
Messsystemanalyse und modelbasierte Sensorfusion für das hydro-graphische Wasserwechselzonenmonitoring mittels unbemannter TrägersystemeZiel des Projektes „Messsystemanalyse und modelbasierte Sensorfusion für das hydrographische Wasserwechselzonenmonitoring mittels unbemannter Trägersysteme (WaMUT)“, welches das GIH in Zusammenarbeit mit dem Bundesamt für Gewässerkunde bearbeitet, ist die konsistente, qualitätsgesicherte Erfassung und Modellierung von Geobasisdaten der Wasserwechselzonen und Flachwasserbereiche der Bundeswasserstraßen zur Qualitätssteigerung – insbesondere kleinräumiger - digitaler Geländemodelle des Wasserverlaufs. Im Gegensatz zu den klassischen geodätischen Beobachtungsverfahren zur Erfassung der Bathymetrie und Topographie rückt in den letzten Jahren die Nutzung unbemannter Sensorplattformen – vor allem landseitig (unmanned aerial vehicle UAV), aber auch auf dem Wasser (unmanned surface vessel USV) – in den Fokus. Diese Messsysteme sollen im Rahmen des Projektes WaMUT validiert und darauf aufbauend ein qualitätsgesichertes, integriertes Messprogramm erstellt werden, um belastbare Geobasisdaten in den Wasserwechselzonen erfassen zu können.Leitung: Ingo Neumann, Hamza AlkhatibTeam:Jahr: 2020Laufzeit: 09/2020 - 12/2023
![]()
![]() © BfG
© BfG
-
Validation and quality assurance concepts for collaborative multi-sensor-systemsThe collaboration of several multi-sensor systems (MSS) has the potential to compensate individual shortcomings, e.g. by sharing navigational information among the nodes of a dynamic sensor network. Within the context of autonomous driving knowledge of the quality of the collected data and the derived trajectory is of great importance. Therefore, uncertainty modelling and propagation is a crucial issue - starting from the single sensors along the entire process chain (e.g. including the calibration and synchronization of the sensors within each MSS) up to the resulting products like 3D mapping information of the environment and the trajectory of the MSS. Numerous investigations deal with more or less specific aspects of the quality assurance of an MSS. Within this doctoral project the focus lies on the quality modelling of the MSS under investigation by the research training group (RTG). Building on this, the gain by the collaboration of MSS for the uncertainty can be evaluated in a subsequent project.Leitung: Ingo NeumannTeam:Jahr: 2019
-
3D HydroMapperIm Rahmen des Verbundprojektes wird ein Messsystem zur Erfassung von Hafenbauwerken entwickelt. Ziel ist es, die Bausubstanz über und unter Wasser möglichst automatisiert, qualitätsgesichert und reproduzierbar mit einem hybriden Multi-Sensor-System zu erfassen. Die Bauwerksschäden sollen mittels Mustererkennungsmethoden automatisch erkannt und klassifiziert werden.Leitung: Ingo Neumann, Hamza AlkhatibTeam:Jahr: 2018Förderung: Förderprogramm für Innovative Hafentechnologien (IHATEC) unterstützt durch das Bundesministerium für Verkehr und digitale Infrastruktur (BMVI)Laufzeit: 12/2018 - 11/2021
![]()
![]()
-
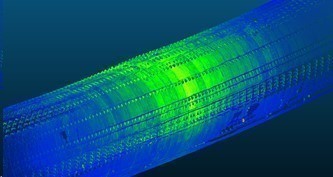
Analysis of Laser Scanner Profile Measurement of TunnelsNowadays, automatic and reliable analysis of laser scanner measurement is important for tunnel structures. In this project, large-scale point cloud data is analyzed in order to monitor the health state of tunnel structures. Comparison is carried out on temporal geometry model and design model, from which the deformation assessment is achieved. In order to monitor the health state of structure, large-scale point cloud data is collected which supplies 3D information of the structure.Leitung: Ingo NeumannTeam:Jahr: 2018Förderung: Shanghai Huace
![]()
![]()
-
Lasertrackermessungen im Rahmen des Großversuchs zur Knickstabilität der Festen FahrbahnKurz vor der Inbetriebnahme der ICE-Neubaustrecke Nürnberg-Erfurt als Teilstück der VDE 8 wurden unter der Federführung des Ingenieurbüros Marx Krontal GmbH und des Instituts für Massivbau Versuche zur Knickstabilität der Festen Fahrbahn durchgeführt. Diese Versuche waren für die Inbetriebnahme der Itztalbrücke bei Coburg erforderlich.Leitung: Ingo Neumann, Ilka von GösselnTeam:Jahr: 2017Laufzeit: 06/2017 - 11/2017
![]()
![]()
-
2D FEM model calibration based on TLSThis research studies the problem of the arch loading case by the combination of finite element analysis (FEA) and B-Splines, which provides a highly accurate solution to the calibration problem of the FEA model. A highly accurate FEA B-Spline model using point clouds from terrestrial laser scanning (TLS) is proposed. Meanwhile, characteristics of arched nodal displacement and stress are discussed. The target function of the optimization is to reduce the displacement error. It is revealed that the B-Spline optimized model based on TLS data with high-accuracy could carry out FEA efficiently with fewer displacement errors, which is an important part of the automatic calibration of FEA.Leitung: Ingo NeumannTeam:Jahr: 2017Laufzeit: 2017 - 2018
![]()
![]()
-
Set-membership Kalman filter and its applicationsState estimation is applicable to virtually all areas of engineering and science. Any discipline that is concerned with the mathematical modelling of its systems is a likely candidate for state estimation. Nonlinear filtering can be a difficult and complex subject in the field of state estimation. Developed in the past hundreds years, the stochastic state estimation techniques are most widely applied in the real world. This approach bases on the probabilistic assumptions of the uncertainties in the system, such as Kalman filter and extended Kalman filter, where uncertain parts (usually noise) in the system are assumed to have certain probability distribution (usually Gaussian distribution).Leitung: Ingo NeumannTeam:Jahr: 2017Förderung: DFG-Graduiertenkolleg i.c.sensLaufzeit: 2017 - 2019
![]()
![]()
-
Integre informationsbasierte GeoreferenzierungSowohl innerhalb geschlossener Räumlichkeiten mit komplexen räumlichen Strukturen (z.B. Bürogebäude) als auch in städtischen Umgebungen, mit einer Vielzahl an höheren Gebäuden, ist eine integre Georeferenzierung von kinematischen Multi-Sensor-Systemen (MSS) nur höchst aufwendig zu realisieren, da u.a. genaue und zuverlässige GNSS-Beobachtungen aufgrund von Abschattungen nicht zur Verfügung stehen. Echtzeitprozessierung oder hohe Genauigkeitsansprüche werden so nur sehr schwer erreicht.Leitung: Ingo NeumannTeam:Jahr: 2017Förderung: DFG-Graduiertenkolleg i.c.sensLaufzeit: seit 2017
![]()
![]()
-
Influence of the uncertainty budget on B-Spline curve estimationIn order to guarantee the quality of a freeform curve and to get more meaningful analysis results, it is essential to be aware of all uncertainties resources and their impact on the estimation. In this work, a more sophisticated uncertainty budget is considered, that contributes to a refined covariance matrix. Uncertainties are modelled and propagated according to the “Guide to the Expression of Uncertainty in Measurements (GUM)”. Furthermore, control points of B-Spline curves are estimated by means of the least-squares methods based on the refined VCM. Comparison have been made between the B-Spline curves using identity and refined weight matrix, which reflects that the uncertainty influence within the estimation cannot be neglected for high quality results.Leitung: Ingo Neumann, Boris Kargoll, Hamza AlkhatibTeam:Jahr: 2017Laufzeit: 2017 - 2019
![]()
![]()
-
Echtzeitfähige, hochfrequente, zentimetergenaue und integrierte Bestimmung der Flugtrajektorie eines UAS mittels Kombination von Laserscanner- und Kameradaten sowie der Integration von ObjektinformationIm Rahmen dieses Forschungsprojektes entwickelt das GIH zusammen mit dem Institut für Photogrammetrie und GeoInformation (IPI) der LUH eine Methodik zur echtzeitfähigen, hochfrequenten, zentimetergenauen und integrierten Bestimmung der Flugtrajektorie eines Unmanned Aerial System (UAS). Bei der Methodik werden GNSS-Daten nur zur Bestimmung von Näherungswerten genutzt, die Bestimmung der Flugtrajektorie erfolgt über Kombination von Laserscanner- und Kameradaten, sowie der Integration von generalisierter Objektinformation (3D-Gebäudemodell Level of Detail (LoD) 2). Die entwickelte Methodik wird auf einem UAS, bestehend aus einem handelsüblichen, mittelpreisigen Unmanned Aerial Vehicle (UAV), zwei Kameras, zwei Profillaserscannern, einer IMU und einem Low-Cost-GNSS-Receiver, umgesetzt.Leitung: Ingo NeumannTeam:Jahr: 2017Förderung: Deutsche Forschungsgemeinschaft (DFG)Laufzeit: seit 01/2017
![]()
![]()
-
Überwachung eines GleisverwerfungsversuchsDas GIH hat bei einem sehr außergewöhnlichen Versuch der Deutschen Bahn, einem Gleisverwerfungsversuch, die messtechnische Überwachung übernommen. Ein zuvor ausgewählter Schienenbereich wurde sehr stark erhitzt, wodurch es zunächst zu einer Verformung und dann zu einer Verwerfung der Schiene gekommen ist. Dieser Gleisverwerfungsversuch fand im Juni 2017 im südlichen Niedersachsen statt.Leitung: Ingo Neumann, Jens-André PaffenholzTeam:Jahr: 2017Laufzeit: 05/2017 - 12/2017
![]()
![]() © GIH / U. Stenz
© GIH / U. Stenz
-
Entwicklung von Algorithmen und Qualitätsprozessen für ein neuartiges kinematisches terrestrisches LaserscanningsystemIm Rahmen des Forschungsprogrammes „Maritime Technologien der nächsten Generation“ ist das Geodätische Institut Hannover Partner in dem vom Bundesministerium für Wirtschaft und Energie (BMWi) geförderten Verbundprojekt "Exakte und schnelle Geometrieerfassung sowie Datenauswertung von Schiffsoberflächen für effiziente Beschichtungsprozesse" (FINISH). Weitere Partner sind: Fr. Lürssen Werft GmbH & Co. KG Bremen, das Vermessungsbüro Dr. Hesse und Partner Ingenieure Hamburg, Fraunhofer-Einrichtung Großstrukturen in der Produktionstechnik Rostock und das Institut für Fertigungstechnik und Werkzeugmaschinen - Leibniz Universität Hannover.Leitung: Ingo NeumannTeam:Jahr: 2016Förderung: PTJ als Projektträger des Bundesministerium für Wirtschaft und Energie (BMWi)Laufzeit: 03/2016 – 02/2019
![]()
![]()
-
Spatio-temporal monitoring of bridge structures using low cost sensorsToday, reliable, accurate and cost-effective vibration analysis of aging infrastructures such as bridges has received considerable attention. In this project, the Geodetic Institute Hannover (GIH), Leibniz University Hannover, is collaborating with ALLSAT GmbH, Hannover, to develop a hardware and software low-cost multi-sensor-system (MSS) technology to reach aforementioned goal.Leitung: Jens-André Paffenholz , Ingo NeumannTeam:Jahr: 2016Förderung: BMWi (Federal Ministry for Economic Affairs and Energy) – ZIM Kooperationsprojekt (Central Innovation Programme for SMEs)Laufzeit: 09/2016 – 09/2018
![]()
![]()
-
Mobile virtuelle Erfassungsplattform und Missionsmanagement für die Qualitätsanalyse und -darstellung von Objekträumen in 3D (MoVEQuaD)Entwicklungsziel des Projektes ist die effiziente Planung, Ergänzung und Optimierung UAS (unmanned airborne system) gestützter Erfassungsprozesse mittels bodengestützter Messplattform sowie die Datenanalyse und Qualitätsbewertung in einer virtuellen 3D Umgebung direkt vor Ort. Die Entwicklungen sind in den Prozess des Lärmschutzes zu integrieren und dafür zu optimieren.Leitung: Ingo NeumannTeam:Jahr: 2015Förderung: VDI/VDE als Projektträger des Bundesministeriums für Wirtschaft und EnergieLaufzeit: 02/2015 - 07/2017
![]()
![]()
-
Planung und Auswertung von Monitoringmessungen für die Untersuchung des Bauwerkszustandes des Schiffshebewerkes Scharnebeck (Lüneburg) im NomalbetriebDas Projekt behandelt das ganzheitliche Monitoring von Großbauwerken am Beispiel des Schiffshebewerkes in Lüneburg, bei dem sowohl klassische geodätische als auch hochpräzise Messverfahren aus dem Maschinenbau zum Einsatz kommen.Leitung: Ingo NeumannTeam:Jahr: 2015Laufzeit: 10/2015 - 2018
![]()
![]()
-
Advanced Rail Track Inspection System (ARTIS)Im Rahmen des Projektes ARTIS entwickelt das GIH in Zusammenarbeit mit dem Unternehmen Dr. Hesse und Partner Ingenieure (DHPI) ein Multisensorsystem zur automatisierten Vermessung von Führungs-, Leit- und Fahrschienen im industriellen Umfeld ohne Betriebsbeeinträchtigung. Ziel des Teilprojektes am GIH ist es den Zustand der Schiene mittels Laserscanning schnell zu erfassen und auf Basis dessen eine Entscheidungsgrundlage zur Sicherstellung der Betriebssicherheit und Standzeitverlängerung von z.B. Kranbahnen bereit zu stellen.Leitung: Ingo NeumannTeam:Jahr: 2013Förderung: AiF als Projektträger des Bundesministeriums für Wirtschaft und Energie im Rahmen der ZIM-InitiativeLaufzeit: 12/2013 – 06/2016
![]()
![]()
-
IRISGeo3D - Teilprojekt: Terrestrisches Laserscanning, Prozessoptimierung und QualitätssicherungDas Projekt IRISGeo3D ist ein durch die AiF als Projektträger des BWi gefördertes ZIM-Koop-Projekt in Zusammenarbeit mit der Geo-Office Gesellschaft für graphische Datenverarbeitung mbH.Leitung: Ingo NeumannTeam:Jahr: 2011Förderung: AiF als Projekträger des Bundesministeriums für Wirtschaft und TechnologieLaufzeit: 11/2011 - 04/2014
![]()
![]()
-
Steuerung und Optimierung von Messprozessen durch die Berücksichtigung von Kostenfunktionen (Risk Minimization in Structural Safty Monitoring)One main goal of structural safety monitoring is minimizing the risk of un-expected collapses of artificial objects and geologic hazards. Behind these activities in the DFG founded project, it is the need of the society in mini-mizing the negative environmental impacts. An optimal configuration for measurement setups and all other decisions shall therefore review and ra-te the risks of an individual monitoring project. Nowadays, the methodolo-gy in many engineering disciplines and mathematically founded decisions are usually based on probabilities and significance levels but not on the risk (consequences or costs) itself.Leitung: Ingo NeumannTeam:Jahr: 2011Förderung: DFGLaufzeit: 09/2011 - 08/2014
![]()
![]()
-
Sicherung neugotischer GewölbekonstruktionenDie Probleme von neugotischen Gewölbekonstruktionen sollen in diesem Projekt mit kultur-bautechnischem Bezug analysiert werden. Hierzu sollen ca. 20 neugotische Kirchen in Niedersachsen in Augenschein genommen, kategorisiert und einige ausgewählte detailliert analysiert werden. An einer Kirche mit signifikanten Schadensmerkmalen sind intensive Untersuchungen des eingesetzten Materials, der statischen Tragwirkung und der Beanspruchbarkeit der Konstruktion sowohl numerisch als auch experimentell geplant. Dafür soll die Geometrie sehr genau mit einem 3D-Laserscan erfasst werden.Leitung: Hans Neuner, Ingo NeumannTeam:Jahr: 2011Förderung: Niedersächsisches Ministerium für Wissenschaft und Kultur, Ev.-luth. LandeskircheLaufzeit: 05/2011 - 09/2014
![]()
![]()
-
Life-Cycle Bridge Engineering – Integriertes Brückenmonitoring mit LaserscanningIm Rahmen der NTH Top-Down Initiative wird ein gemeinsames Forschungsvorhaben des Institutes für Massivbau und des Geodätischen Institutes im Rahme des Verbundprojekt „Strategien und Methoden des Life-Cycle-Engineerings für Ingenieurbauwerke und Gebäude“ gefördert.Leitung: Hans Neuner, Ingo NeumannTeam:Jahr: 2010Förderung: NTH Top-Down InitiativeLaufzeit: 07/2010 - 12/2013
![]()
![]()
-
Alternative Verfahren zur Modellierung von Unsicherheiten in ingenieurgeodätischen ProzessenIm Guide to the Expression of Uncertainty (GUM) wird eine Unterteilung der Unsicherheiten in zufällig und systematisch wirkende Einflüsse vorgeschlagen. Im Rahmen dieses Projekts sollen insbesondere die systematischen Unsicherheiten mit Hilfe von Fuzzy-, Bayes- und Monte Carlo-Verfahren ermittelt werden. In diesem Zusammenhang werden Laserscanning- und Wertermittlungsdaten untersucht.Leitung: Hamza Alkhatib, Ingo NeumannTeam:Jahr: 2009Laufzeit: seit 2009
![]()
![]()
-
Geodätische Deformationsanalysen unter Berücksichtigung von Beobachtungsimpräzision und ObjektunschärfeDie Überwachung von Bauwerken, Rutschhängen und rezenten Krustenbewegungen ist eine Hauptaufgabe der Ingenieurgeodäsie. Ob und wann bau- oder geotechnische Sicherungsmaßnahmen eingeleitet werden können, hängt dabei im Wesentlichen von der Qualität und Aktualität der geodätischen Mess- und Auswertemethodik ab. Damit die Messungen aus der Praxis in den Modellannahmen treffend beschrieben werden können, muss der komplette Unsicherheitshaushalt der Messungen umfassend aufgeschlüsselt werden.Leitung: Hansjörg KuttererTeam:Jahr: 2004Förderung: DFGLaufzeit: 2004-2010
![]()
![]()
Forschungsprojekte von Prof. Dr.-Ing. Ingo Neumann









































Letzte Änderung: 11.04.24





