
Adaptive Kalmanfilterung und Parameterschätzung in ingenieurgeodätischen Messsystemen
| Team: | Jens-André Paffenholz |
| Jahr: | 2009 |
| Ist abgeschlossen: | ja |
Projektbeschreibung
Zur Bestimmung von Transformationsparameter für ein ingenieurgedätisches Messsystem vom lokalen sensor-definierten Koordinatensystem in ein übergeordnetes Koordinatensystem bietet sich die Verwendung eines adaptiven extended Kalman Filter an.
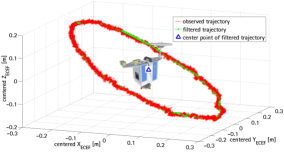
Am Beispiel eines Multi-Sensor-Systems bestehend aus einem terrestrischen Laserscanner und 3D Positionssensoren wurde ein adaptiver extended Kalman Filter entwickelt. Somit können die Transformationsparameter -Position und Orientierung/Azimut- einer statischen Laserscanneraufnahme in ein übergeordnetes Koordinatensystem abgeleitet werden.





