
Bayes‘sche/Monte Carlo Modellierung geodätischer Prozesse
| Team: | Hamza Alkhatib |
| Jahr: | 2008 |
| Laufzeit: | 2008 - 2014 |
| Ist abgeschlossen: | ja |
Projektbeschreibung
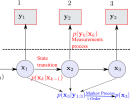
In vielen Anwendungsgebieten der Geodäsie wird die optimale Schätzung des Zustandes eines Systems benötigt, der sich über ein bestimmtes Zeitintervall verändert und gemessen wird. Dazu werden verschiedene Gleichungen (System- und Messgleichungen) zur Modellierung des Systemzustandes aufgestellt. Die rekursive Schätzung des Systemzustandes wird in der Literatur als Filterung im Zustandsraum bezeichnet.
Die derzeit am häufigsten verwendete statistische Filterung ist die Klasse des Kalman-Filters. Das Kalman-Filter stellt eine effiziente Methode zur Filterung dar, wenn von normalverteilten System- und Beobachtungsrauschen ausgegangen wird und die Parameter der Verteilung a-priori bekannt ist. Weiterhin wird angenommen, dass sowohl die Veränderung des Zustandes (die Systemgleichung) als auch die Messgleichungen linear und ebenfalls a-priori bekannt sind. Unter diesen Voraussetzungen stellt das Kalman-Filter eine optimale Lösung dar.
Beim Partikel-Filter wird dagegen auf die Annahme der Normalverteilung und der Linearität der Zustandsgleichungen verzichtet. Es wird nicht mehr von einem wahren Wert ausgegangen, sondern die Schätzung wird als Wahrscheinlichkeitsverteilung modelliert. Die Wahrscheinlichkeitsverteilung wird anhand einer großen Anzahl von Realisierungen (auch bekannt als Partikel) repräsentiert. Die Partikel werden dabei auf Basis einer Monte-Carlo-Technik, dem sog. Sequentielle Importance Sampling (SIR) generiert.
Im Rahmen dieses Forschungsprojekts werden verschiedene Filter-Algorithmen auf eine Reihe typischer geodätischer Aufgaben wie die der Georeferenzierung angewandt.





